The effect of changing foot progression angle using real-time visual feedback on rearfoot eversion during running.
달릴 때 실시간 시각 피드백을 사용하여 발 진행 각도를 변경하는 것이 후족부 외번에 끼치는 영향.
Mousavi SH, van Kouwenhove L, Rajabi R, Zwerver J, Hijmans JM (2021) The effect of changing foot progression angle using real-time visual feedback on rearfoot eversion during running. PLoS ONE 16(2): e0246425. https://doi.org/10.1371/journal.pone.0246425
배경 달릴 때 후족부 (rearfoot) 가 과하게 내번 (inversion) 혹은 외번 (eversion) 되는 것은 더 높은 부상 확률과 연관된 것으로 알려져 있다. 그래서 많은 임상가들이 후족부 부정 정렬을 교정하기 위한 연구를 진행하였고 이를 교정하기 위해 발 보조기, 신발 및 테이핑 등을 포함한 다양한 중재가 개발되었다. 하지만 후족부의 부정 정렬 (atypical inversion/eversion) 을 교정하기 위해 보행 습관을 교정하기 위한 노력은 부족한 실정이다. 본 연구에서는 실시간 시각 피드백 (real-time visual feedback) 을 사용하여 의도적으로 안짱 (toe-in) 혹은 팔자 (toe-out) 로 달리기를 하는 것이 후족부의 내/외번, 거골하 회내 (subtalar pronation), 내측 종족궁 각도 (medial longitudinal arch angle) 및 특정 하지 관절 생체역학적 인자들에 어떠한 영향을 끼치는지 살펴보았다.
방법 본 연구는 운동 목적으로 주기적으로 달리기 하는 15명의 여성 피험자들을 대상으로 수행되었다. 모든 피험자들은 평소 달리는 방식에서 발 진행 각도 (foot progression angle) 를 의도적으로 내측으로 5° 혹은 외측으로 5° 회전한 상태로 달리도록 하였다. 발 진행 각도를 바꾸는 것은 실시간 시각 피드백을 이용하여 확인하였다. 달라진 발 진행 각도별로 후족부의 내/외번, 거골하 회외/회내 (supination/pronation), 내측 종족궁 각도, 발 진행 각도, 고관절 굴곡, 외전/내전 (abduction/adduction) 및 내/외회전 (internal/external oration), 무릎 굴곡, 발목 배굴 (ankle dorsifexion) 및 발목 힘 (power) 의 3차원 역학 (kinematics) 을 분석하였다. 각 인자들이 어떻게 다른지는 반복 측정 분산 분석 (repeated measures ANOVA) 과 쌍별 비교 (pairwise comparison) 를 사용하여 통계적으로 분석하였다.

(그림 설명: 우측과 같은 탐지자를 부착하여 트레드밀에서 달리기를 수행할 때 각종 하지 관절 역학적 인자를 측정하였다. 좌측과 같이 피험자는 트레드밀에서 달리면서 발의 진행 각도 (빨간선) 가 목표 범위 (녹색 부채꼴) 에 들어가도록 달리는 것에 익숙해지도록 하여 안정적인 발 진행 각도가 나올 때 역학적 인자들을 측정하였다.)
결과 안짱으로 달릴 때는 평소대로나 팔자로 달릴 때와 비교하여 최대 후족부 외번 각도가 감소하였고 (평소와의 평균 차이 (mean difference, MD) = 2.1°; p<0.001, 팔자와의 MD = 3.5°; p<0.001), 최대 회내 각도도 감소하였으며 (평소와의 MD = -2.0°, p<0.001, 팔자와의 MD = -3.4, p = <0.001) 및 최대 내측 종족궁 각도도 감소하였다 (평소와의 MD = -0.7°, p = 0.022, 팔자와의 MD = -0.9, p = 0.005). 이러한 통계학적 차이는 역으로 나타나서 팔자 달리기가 평소 및 안짱 달리기에 비해 이러한 운동학적 요인을 유의하게 증가시켰다. 평소대로 달리기에 비해 안짱 달리기는 최대 고관절 내회전을 증가시켰고 (MD = 2.3; p<0.001), 최대 무릎 굴곡을 감소시켰다 (MD = 1.3; p = 0.014). 평소대로 달리기와 비교하여 팔자 달리기는 최대 고관절 내회전 (MD = 2.5; p<0.001), 최대 고관절 내/외전 각도 (MD = 2.5; p<0.001), 최대 무릎 굴곡 (MD = 1.5; p = 0.003), 최대 발목 배굴 (MD = 1.6, p<0.001) 및 최대 발목 힘 (MD = 1.3, p = 0.001) 을 감소시켰다. 피험자들은 달릴 때 실시간 시각 피드백을 이용하여 발 진행 각도를 의도하는 만큼 조정하는 것이 가능하였다.
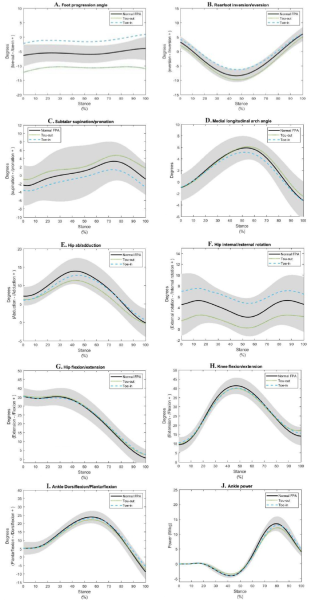
(발 진행 각도별 (검은 실선: 평소대로, 녹색 점선: 팔자 배열, 하늘색 점선: 안짱 배열) 로 보행 주기에 따른 각 인자들의 평균 값. 회색 영역은 평소대로 달릴 때 해당 인자들의 ± 1 표준편차를 의미함.)
결론 의도적으로 안짱 혹은 팔자 배열로 달리는 것은 후족부의 역학 및 내측 종족궁 각도에 영향을 미친다. 따라서 후족부의 부정 정렬을 교정해야 할 때 실시간 시각 피드백을 사용하여 발 진행 각도에 초점을 맞춘 보행 재훈련이 치료에 도움이 될 수 있다. 달릴 때 발 진행 각도를 변화하는 것은 하지 관절의 생체역학적 변화를 동반한다는 점을 고려해야 한다.